콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 


기계
자기 균형 이륜 변신 로봇
출원번호 : 10-2021-0075667 (출원일: 2021-06-10)
등록번호 : 10-2457384 (등록일: 2022-10-18)
특허권자 : 충남대학교산학협력단
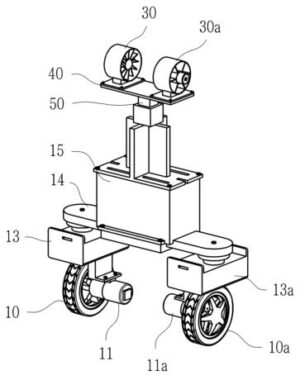
요약 : 본 발명은 자기 균형 이륜 변신 로봇에 관한 것이다. 본 발명은 구동바퀴(10, 10a)가 세그웨이 모드와 바이시클 모드로 전환될 수 있는 전환수단을 포함하고, 상기 전환수단은 세그웨이 모드에서 구동바퀴(10, 10a)의 전후방으로 기울어짐을 제어하기 위한 전후방 균형제어수단과, 바이시클 모드에서 좌우측 기울어짐을 제어하기 위한 좌우측 균형제어수단을 포함하며, 상기 구동바퀴(10, 10a)의 구동 속도와 전후방 균형제어수단 및 좌우측 균형제어수단을 제어하는 제어부(20)를 포함하여 세그웨이 모드와 바이시클 모드로 상호 전환 가능하고, 전후방향, 회전방향 및 좌우측 기울어짐의 각도 제어 및 속도 제어를 용이하게 할 수 있게 된다.
대표청구항 : 자기 균형 이륜 변신 로봇에 있어서,개별적 구동수단을 구비하는 한 쌍의 구동바퀴(10, 10a);상기 구동바퀴(10, 10a)가 세그웨이 모드와 바이시클 모드로 전환될 수 있는 전환수단을 포함하고,상기 전환수단은 세그웨이 모드에서 상기 구동바퀴(10, 10a)의 전후방으로 기울어짐을 제어하기 위한 전후방 균형제어수단과,바이시클 모드에서 헤딩각 발생시 덕티드 팬(30, 30a)을 원주 방향으로 회전시키기 위한 회전수단으로 좌우측 기울어짐을 제어하기 위한 좌우측 균형제어수단을 포함하며,상기 구동바퀴(10, 10a)의 구동 속도와 전후방 균형제어수단 및 좌우측 균형제어수단을 제어하는 제어부(20)를 포함하며,상기 제어부(20)는 이륜 변신 로봇의 전후 방향 및 좌우 방향으로 기울어지는 각도를 측정하는 자이로 센서(200)와, 상기 자이로 센서(200)와 세그웨이 모드 및 바이시클 모드에 따라 추종된 속도·위치·각도에 따르는 인터럽트 신호가 입력되어 PID 제어를 위한 연산을 수행하는 DSP(210)와, 상기 DSP(210)에서 출력되는 제어 신호에 의해 구동하는 구동부(220)를 포함하며,상기 DSP(210)는 세그웨이 모드와 바이시클 모드에 따르는 인터럽트 신호가 입력되는 외부 인터럽트 모듈(211)과, 상기 외부 인터럽트 모듈(211)에서 출력되는 이륜 변신 로봇의 속도 추정부(2120)와 위치 추종부(2121) 및 각도 추종부(2122)를 추종하는 트리거 신호 추종부(212)와, 상기 트리거 신호 추종부(212)에서 출력되는 트리거 신호가 입력되어 상기 구동바퀴(10, 10a)가 기울어지는 각도와 속도 및 위치와 같은 자세 제어를 위한 연산을 수행하는 PID제어부(213)을 포함하며,상기 구동부(220)는, 헤딩각 발생에 의한 상기 PID제어부(213)의 출력신호에 따라 헤딩각에 대응하도록 상기 덕티드 팬(30, 30a)을 회전시키는 덕티드 팬 회전 구동부(2201)와, 상기 PID제어부(213)의 출력신호에 따라 덕티드 팬(30, 30a)의 스피드와 개별구동을 제어하는 덕티드 팬 구동부(2202)와, 상기 PID제어부(213)의 출력신호에 따라 구동바퀴(10, 10a)를 세그웨이 모드와 바이시클 모드로 전환시키는 구동바퀴 모드 전환부(2203)와, 상기 PID제어부(213)의 출력신호에 따라 구동바퀴(10, 10a)의 스피드를 제어하는 구동바퀴 구동부(2204)로 이루어지는 것을 포함하는 자기 균형 이륜 변신 로봇.
상세링크 : http://newsd.wips.co.kr/wipslink/api/dkrdshtm.wips?skey=3522434000688