콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 
출원번호 : 10-2019-0113360 (2019년09월16일)
등록번호 : 10-2258730 (2021년05월25일)
특허권자 : 배재대학교 산학협력단
요약 :
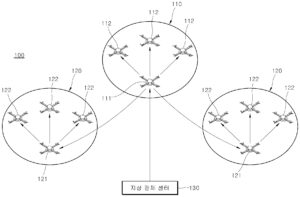
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 시스템은 하나의 마스터 그룹과 복수의 서브 그룹으로 구성되되, 상기 마스터 그룹과 복수의 서브 그룹은 조작 신호를 수신하여 비행하는 마스터 무인 비행체, 및 상기 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 서브 무인 비행체를 포함하는 복수의 무인 비행체 그룹; 및 상기 마스터 무인 비행체에 상기 조작 신호를 전송하여 상기 복수의 무인 비행체 그룹에 대한 군집 비행을 제어하되, 상기 마스터 무인 비행체 각각의 비행 정보(속도, 방향 및 거리를 포함) 및 주변 환경 정보(풍속, 풍향 및 고도를 포함)를 이용하여 상기 마스터 그룹을 기준으로 상기 서브 그룹의 포메이션(Formation)을 변경하도록 비행 제어를 수행함으로써 상기 군집 비행의 안정도를 향상시키는 지상 관제 시스템을 포함한다.
1020190113360