출원번호 : 10-2019-0085499 (2019.07.16)
등록번호 : 10-22650810000 (2021.06.09)
특허권자 : 남서울대학교 산학협력단
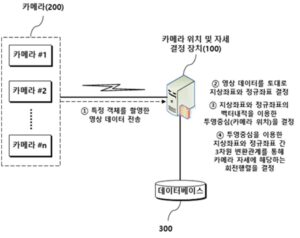
요약 : 더욱 상세하게는 카메라에서 촬영한 영상을 토대로 3차원의 지상좌표와 이에 대응되는 2차원의 정규좌표를 벡터내적을 이용하여 카메라 위치에 해당하는 투영중심을 결정하고, 상기 결정한 투영중심을 이용한 지상좌표와 정규좌표간의 3차원 변환관계를 통해 카메라의 자세에 해당하는 회전행렬을 결정함으로써, 짐벌락(Gimbal lock) 현상이 발생하지 않도록 하고, 투영중심과 촬영방향과 관련된 외부표정요소(Exterior Orientation Parameters)를 정확하고 신속하게 결정할 수 있도록 하는 카메라의 위치 및 자세를 결정하는 시스템에 관한 것이다.
1020190085499