콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 


출원번호 : 10-2020-0100374 (2020.08.11)
등록번호 : 10-23309760000 (2021.11.22)
특허권자 : 한남대학교산학협력단
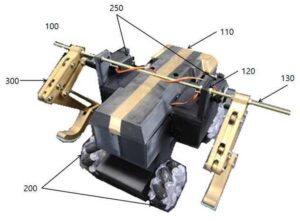
요약 : 기존의 2족 또는 4족 보행 로봇 및 차륜형 로봇의 정찰로봇으로써의 단점을 보완하기 위해 4륜 구조의 정찰로봇에 랩터다리 하체구조를 모아 정찰형 랩터로봇을 발명하였다.
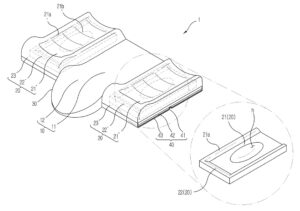
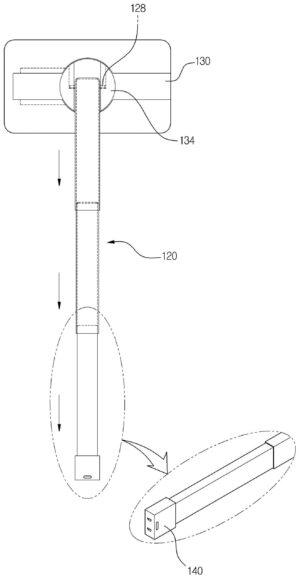
본 발명의 정찰형 랩터 로봇은 몸체; 및 상기 몸체 하부에 구비되는 4개의 메카넘휠 및 상기 4개의 메카넘휠을 구동하는 4개의 구동부; 및 상기 몸체의 양 측면에 구비되는 랩터다리 고정부; 및 상기 랩터다리 고정부와 랩터다리를 관통하여 회전 가능하게 지지하는 랩터다리 연결봉; 및 상기 랩터다리 연결봉에 연결되는 랩터다리를 구비하는 것을 특징으로 하는 정찰형 랩터 로봇을 제공한다.
상기와 같은 구성에 의하여 평지에서는 바퀴로, 장애물이 있는 경우에는 랩터다리를 이용하여 장애물을 극복하고 정찰할 수 있는 수단을 제공하는 효과가 있다.