콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 
출원번호 : 10-2018-0109355(2018년09월13일)
등록번호 : 10-2087013(2020월03월04일)
특허권자 : 명지대학교 산학협력단
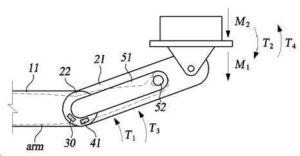
요약 : 본 발명의 일 실시예에 의하면, 제1링크부, 상기 제1링크부의 일단에 회동 가능하도록 연결되며, 작동자의 의사에 의해 동작되도록 구비된 제2링크부, 상기 제2링크부 상의 일 영역에 인가되는 부하를 감지하기 위한 부하감지센서 및 상기 작동자의 동작을 감지하기 위한 동작감지센서를 포함하며, 상기 부하감지센서와 상기 동작감지센서는 각각 독립적으로 상기 부하 및 상기 작동자의 동작을 감지하는 것을 특징으로 하는, 근력증강로봇의 사용자 의도 감지를 위한 센서 장착 메커니즘을 제공한다.