콘텐츠로 건너뛰기
콘텐츠로 건너뛰기 

출원번호 : 10-2019-0087736 (2019년07월19일)
등록번호 : 10-2258731 (2021년05월25일)
특허권자 : 배재대학교 산학협력단
요약 :
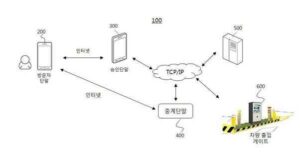
본 발명의 일 실시예에 따른 무인 비행체의 편대 비행 시퀀스 제어 시스템은 미리 설정된 편대 비행 시퀀스(Sequence)를 유지하면서 비행하는 복수의 무인 비행체; 및 상기 편대 비행 시퀀스를 유지할 수 있도록 상기 복수의 무인 비행체 각각의 비행을 제어하는 지상 관제 센터를 포함하고, 상기 지상 관제 센터는 편대 비행 중인 상기 복수의 무인 비행체 각각으로부터 현재 지점의 위치 정보를 수신하는 통신 인터페이스부; 상기 현재 지점의 위치 정보 및 미리 설정된 목표 지점의 위치 정보를 이용하여 상기 복수의 무인 비행체 각각의 상대 위치 정보를 도출하고, 상기 상대 위치 정보에 기초하여 상기 복수의 무인 비행체 각각의 비행 순서를 결정하는 비행 스케줄링부; 및 상기 복수의 무인 비행체 각각을 모니터링하여 상기 복수의 무인 비행체 각각의 비행 정보 및 상태 정보를 포함하는 모니터링 정보를 획득하고, 상기 비행 순서를 기준으로 선행 무인 비행체의 앞에 위치한 선선행 무인 비행체의 모니터링 정보를 후행 무인 비행체에 전송하여, 상기 후행 무인 비행체가 상기 선선행 무인 비행체의 비행 정보에 따라 편대 비행 시퀀스를 유지하면서 비행하도록 제어하는 비행 관제부를 포함한다.
1020190087736